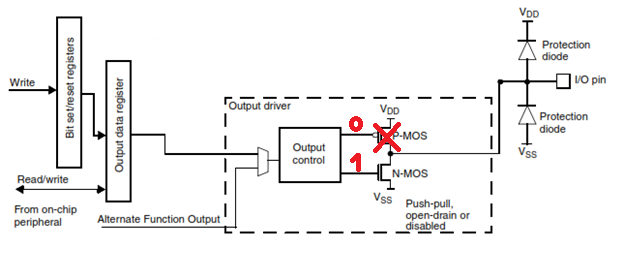
Tiếp theo chúng ta đến phần cấu trúc 1 chân GPIO của chip:
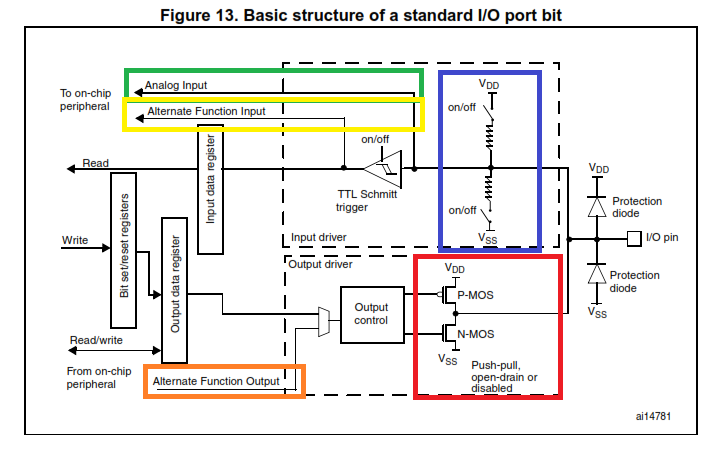
Có 2 khối điều khiển khác nhau (khung hình nét đứt) như ở hình trên
– Output
– Input và các điều khiển đầu ra khác
Chức năng của GPIO bao gồm:
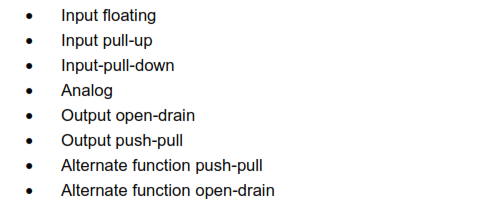
Bài viết này sẽ hướng dẫn về chức năng Output states: Output push-pull. Sau đây sẽ là sơ lược về cấu trúc phần cứng và khối điều khiển Output.
1. Các thanh ghi dữ liệu:
Bit set/reset register:
Ở mỗi chân general-purpose I/O port đều có 2 thanh ghi cấu hình 32 bit (GPIOx_CRL, GPIO_CRH: Control Register High, Control Register Low):
– Thanh ghi 32 bit dùng để set/reset các bit ở các chân IO (GPIOx_BSRR: Bit Set Reset Register)
– Thanh ghi 16 bit reset các bit ở các chân IO (GPIOx_BRR: Bit Reset Register) với x là các port của vi điều khiển.
Output data register:
Dữ liệu sau khi các bit đã được set/reset ở thanh ghi trên sẽ được truyền sang thanh ghi dữ liệu đầu ra 32bit (GPIOx_ODR: Output data register) và truyền đến khối điều khiển để xuất mức tín hiệu cho chân IO. Ngoài ra đối với thanh ghi này, chúng ta có thể đọc dữ liệu để xem trạng thái hiện tại của các chân IO đang ở mức “1” hoặc mức “0”.
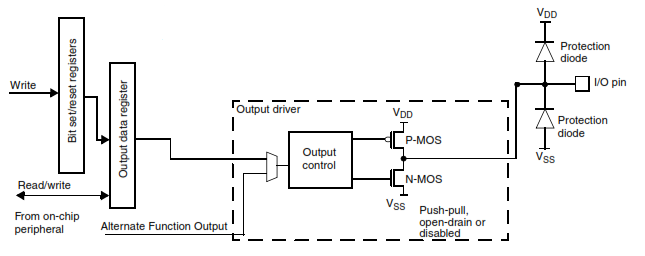
2.Cách xuất mức tín hiệu output thông qua khối CMOS:
Ở push-pull mode:
Cấu hình chân I/O là ngõ ra, khi output control = 0 thì P-MOS sẽ dẫn, chân I/O sẽ nối VDD, còn khi output control = 1 thì N-MOS dẫn, chân I/O được nối VSS.
Khi ghi các bit Reset vào thanh ghi GPIOx_BSRR hoặc GPIOx_BRR dữ liệu sẽ được truyền sang thanh ghi output và đẩy tới khối điều khiển. Đầu ra của P-MOS sẽ là mức 1 vì ở trước P-MOS có 1 cổng đảo tín hiệu và N-MOS sẽ là mức 0, thì lúc này P-MOS sẽ được kích và chân IO có tín hiệu mức “1”:
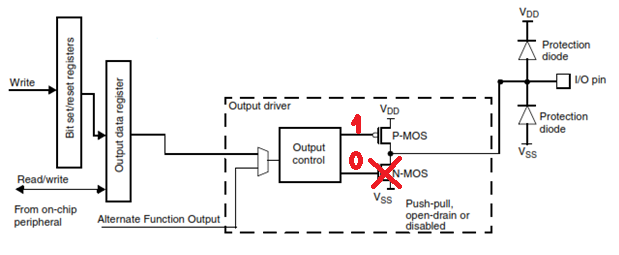
Ngược lại, khi ghi các bit Set vào thanh ghi GPIOx_BSRR dữ liệu sẽ được truyền sang thanh ghi output và đẩy tới khối điều khiển. Đầu ra của P-MOS sẽ là mức 0 vì ở trước P-MOS có 1 cổng đảo tín hiệu và N-MOS sẽ là mức 1, thì lúc này N-MOS sẽ được kích và chân IO có tín hiệu mức “0”:
Chúng ta sẽ sử dụng CubeMX để sinh code và lập trình trên môi trường KeilC-V5. Khi sinh code, chúng ta sẽ làm việc dựa trên lớp thư viện HAL-Hardware Abstraction Layerr. Thư viện này được xây dựng dựa trên các thư viện tiêu chuẩn (Std) của STM32, để tiếp cận được nhanh chóng dòng vi điều khiển này thì chúng ta sẽ không đi quá sâu vào việc set/reset các bit ở trong thanh ghi. Mà sử dụng phần mềm CubeMX để sinh code và sử dụng các hàm GPIO có sẵn trong thư viện HAL.
Bit set/reset register:
Ở mỗi chân general-purpose I/O port đều có 2 thanh ghi cấu hình 32 bit (GPIOx_CRL, GPIO_CRH: Control Register High, Control Register Low):
– Thanh ghi 32 bit dùng để set/reset các bit ở các chân IO (GPIOx_BSRR: Bit Set Reset Register)
– Thanh ghi 16 bit reset các bit ở các chân IO (GPIOx_BRR: Bit Reset Register) với x là các port của vi điều khiển.
Output data register:
Dữ liệu sau khi các bit đã được set/reset ở thanh ghi trên sẽ được truyền sang thanh ghi dữ liệu đầu ra 32bit (GPIOx_ODR: Output data register) và truyền đến khối điều khiển để xuất mức tín hiệu cho chân IO. Ngoài ra đối với thanh ghi này, chúng ta có thể đọc dữ liệu để xem trạng thái hiện tại của các chân IO đang ở mức “1” hoặc mức “0”.
2.Cách xuất mức tín hiệu output thông qua khối CMOS:
Ở push-pull mode:
Cấu hình chân I/O là ngõ ra, khi output control = 0 thì P-MOS sẽ dẫn, chân I/O sẽ nối VDD, còn khi output control = 1 thì N-MOS dẫn, chân I/O được nối VSS.
Khi ghi các bit Reset vào thanh ghi GPIOx_BSRR hoặc GPIOx_BRR dữ liệu sẽ được truyền sang thanh ghi output và đẩy tới khối điều khiển. Đầu ra của P-MOS sẽ là mức 1 vì ở trước P-MOS có 1 cổng đảo tín hiệu và N-MOS sẽ là mức 0, thì lúc này P-MOS sẽ được kích và chân IO có tín hiệu mức “1”:
Ngược lại, khi ghi các bit Set vào thanh ghi GPIOx_BSRR dữ liệu sẽ được truyền sang thanh ghi output và đẩy tới khối điều khiển. Đầu ra của P-MOS sẽ là mức 0 vì ở trước P-MOS có 1 cổng đảo tín hiệu và N-MOS sẽ là mức 1, thì lúc này N-MOS sẽ được kích và chân IO có tín hiệu mức “0”:
Chúng ta sẽ sử dụng CubeMX để sinh code và lập trình trên môi trường KeilC-V5. Khi sinh code, chúng ta sẽ làm việc dựa trên lớp thư viện HAL-Hardware Abstraction Layerr. Thư viện này được xây dựng dựa trên các thư viện tiêu chuẩn (Std) của STM32, để tiếp cận được nhanh chóng dòng vi điều khiển này thì chúng ta sẽ không đi quá sâu vào việc set/reset các bit ở trong thanh ghi. Mà sử dụng phần mềm CubeMX để sinh code và sử dụng các hàm GPIO có sẵn trong thư viện HAL.
Không có nhận xét nào:
Đăng nhận xét